Alors que les essaims de drones aériens se développent, l’Europe progresse désormais dans un projet d’essaim de drones sous-marins composé d’une flotte de plateformes autonomes interconnectées destinées à mener diverses missions navales futures.
Entré dans sa quatrième année, le projet Swarm of Biomimetic Underwater Vehicles (SABUVIS), piloté par l’Agence européenne de défense (AED), annonce une possible évolution majeure dans l’approche des marines en matière de surveillance, de lutte contre les mines, de guerre des fonds marins et d’opérations en zones maritimes contestées.
Fonctionnant en essaim coordonné plutôt qu’en unités isolées, ce système vise à offrir une plus grande rapidité, une efficience économique et une meilleure résilience. Des essaims de véhicules autonomes à moindre coût permettent de répartir les risques, complexifier la cible pour l’adversaire et maintenir l’efficacité des missions même si certains engins sont perdus.
Le projet rassemble quatre États membres participants, avec la Pologne en tête de file, accompagnée de l’Allemagne, du Portugal et de la Slovénie.
Après une première phase, SABUVIS II a abordé les défis majeurs liés à l’autonomie sous-marine, tels que la perte du suivi satellitaire sous la surface, la bande passante limitée des communications, la latence élevée et l’imprévisibilité de l’environnement d’opération.
SABUVIS II : enseignements majeurs
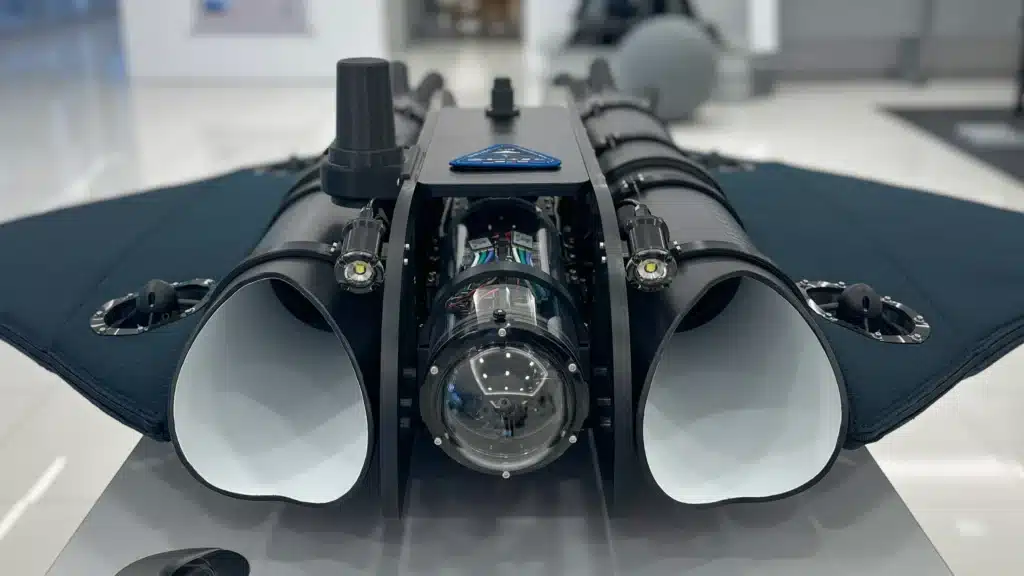
SABUVIS II a développé et évalué trois concepts complémentaires : des essaims évolutifs et économiques de véhicules sous-marins autonomes, des véhicules biomimétiques optimisés pour la maniabilité en eaux littorales peu profondes ou encombrées, et des essaims mixtes intégrant véhicules sous-marins et plateformes de surface autonomes.
Ce projet s’appuie sur des travaux antérieurs, notamment l’initiative SALSA de l’AED (Smart Adaptive Long- and Short-range Acoustic network), qui a créé des technologies de réseaux acoustiques sous-marins adaptatifs pour soutenir la connectivité et l’échange de données entre plusieurs plateformes autonomes.
« SABUVIS II a démontré que l’exécution d’une mission ne dépend pas d’une plateforme unique », a déclaré l’AED. « Les systèmes hétérogènes peuvent être alignés grâce à des standards et interfaces communs. Au-delà du matériel et des algorithmes, le projet a mis en place des environnements avancés de simulation et de tests où les comportements d’essaims ont pu être évalués, optimisés et validés avant leur déploiement. »
Essais sur le terrain
La deuxième phase a culminé début février avec une série de démonstrations organisées en Pologne, en Allemagne et au Portugal, lors de l’exercice REPMUS 2025.
Lors de ces essais, des essaims mixtes de drones sous-marins ont été testés dans des conditions opérationnelles réalistes, mettant en lumière la coordination des mouvements, l’échange fiable de données, le contrôle des formations et l’adaptation dynamique des missions.
Ces démonstrations ont également permis d’avancer l’intégration de systèmes hétérogènes via des architectures de commandement et de contrôle, assurant ainsi l’interopérabilité entre véhicules autonomes de différentes nations et fabricants.
